Un tanque con una bomba y una válvula de resistencia variable
Problema 5.2 (Process Control- Coughanowr, LeBlanc)
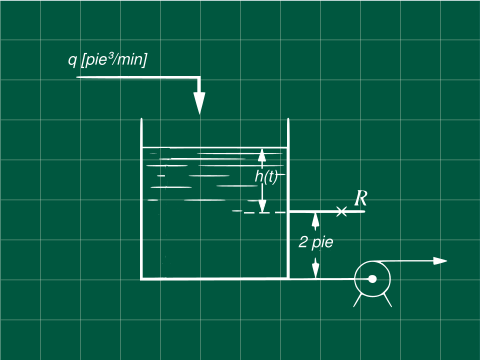
El sistema mostrado en la figura tienen un área seccional $A=3\text{ pie²}$, la ecuación de la válvula es $q=8\sqrt{h}$. Con q en [pie³/min] y h (altura desde encima de la válvula) en [pie].
Calcule la constante del tiempo $\tau$ para cuando la altura por encima de la válvula en estado estacionario es a) 3 pie y b) 9 pie.
Resolviendo
$$ \begin{array}{l} Datos\ A = 3 \text{ pie²}\ q_0=8 \sqrt{h} \end{array} $$
Linealizando $q_0=8 \sqrt h$
La expandimos usando las serie de Taylor al rededor del estado estacionario.
$$ f(x) = f(x_s)+\frac{df}{dt}\bigg |_{x=x_s} (x-x_s) $$
$$ q_0=8\sqrt{h_s}+\frac{4}{sqrt{h_s}}(h-hs) $$ $$ q_0=q_{0s}+\frac{4}{sqrt{h_s}}(h-hs) $$
$$ q_0-q_{0s}=\frac{4}{\sqrt{h_s}}(h-hs) $$
Hagamos $R=\frac{\sqrt{h_s}}{4}\space\space\space\textbf{ (A)}$
$$ q_0-q_{0s}=\frac{(h-hs)}{R}\space\space\space\space\textbf{(1)} $$
Realizando el balance en el sistema
$$ q - q_0 - q_b= \frac{dV}{dt} \space\space\space\space (2)\textbf{(2)} $$
Escribiendo el balance en estado estacionario
$$ q_s- q_s0 -q_b= 0 \space\space\space\space \textbf{(3)} $$
Restando (2) con (1) para obtener las variables desviación y recordando que $dh=d(h-h_s)$, por ser $h_s$ constante.
$$ q-q_s-(q_s-q_s0)=A\frac{d(h-h_s)}{dt} $$
Reemplazando con la ecuación (1)
$$ q-q_s-\frac{(h-hs)}{R}=A\frac{d(h-h_s)}{dt} $$
Transformando a variables desviación
$$ Q - \frac{H}{R} = A\frac{dH}{dt} $$
Aplicando la tranformada de Laplace y sabiendo que $H(t=0)= h-h_s=h_s-h_s=0$
$$ Q(s) - \frac{H(s)}{R} = A\left[sH(s)-H(t=0)\right]\ \ Q(s) - \frac{H(s)}{R} = AsH(s) $$
$$ \frac{H(s)}{Q(s)}=\frac{R}{ARs+1} \ $$
Por comparación con el modelo de primer orden $\frac{H(s)}{Q(s)}=\frac{Kp}{\tau s+1}$ y sabiendo que $A=3$ y $R = \sqrt{h_s}/4$
Notamos que $$\tau=AR=3\frac{\sqrt{h_s}}{4}$$
Para a) $h_s=3$ $$ \mathbf{\tau = 1.2990\space min} $$ Para b) $h_s=9$ $$ \mathbf{\tau = 2.25 \space min} $$
Referencias
- Coughanowr, D. R.; LeBlanc, S. E. (2009). Process Systems Analysis and Control (3rd edition). McGraw-Hill. ISBN 978-0-07-339789-4.