Un Cono por tanque con una válvula.
Problema 5.18 (Process Systems Analysis and Control - Coughanowr, LeBlanc)
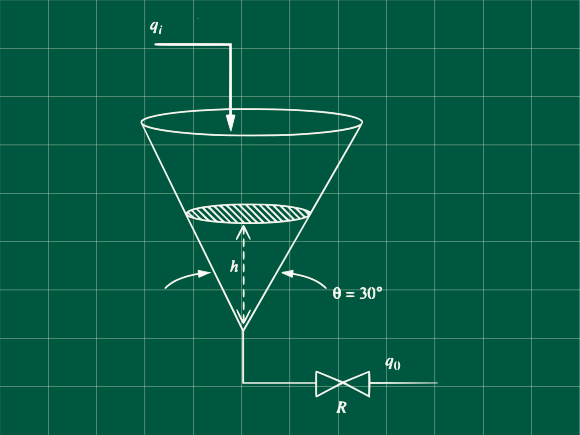
Encuentre la función transferencia que relaciona la altura del embudo tanque y los cambios en el caudal de entrada.
Asumiendo densidad constante, realizamos nuestro balance de materia
$$ q_i-q_o=\frac{dV}{dt}\space\space\space\space\textbf{... }\mathbf{(\alpha)} $$
Observamos que nuestro volumen es dependiente de la altura de manera no lineal. Nuestro radio y volumen estan en función de la altura
$$ r = h\cdot tan(15°) $$
$$ V = \frac{\pi r^2 h}{3} $$
Poniendo el volumen en función de h, y haciendo $k_1=\pi tan^2(15°)/3$ $$ V = \frac{\pi tan^2(15°)}{3}h^3 $$
$$ V = k_1h^3 $$
Linealizando usando la serie de Taylor truncada a primer orden, alrededor del estado estacionario
$$ f(x)=f(x_s)+\frac{df}{dx}\bigg |_{x=x_s} (x-x_s) $$
Siendo nuestra función a linealizar $f(h)=V=k_1h^3$, recuerde que $f(h_s)=V_s=k_1h_s^3$
$$ V=k_1h_s^3+3k_1h_s^2(h-h_s) $$
$$ V=V_s+3k_1h_s^2(h-h_s) $$
$$ V-V_s=3k_1h_s^2(h-h_s) $$
Diferenciando la ecuación convenientemente
$$ d(V-V_s)=3k_1h_s^2\cdot d(h-h_s)\space\space\space\space\textbf{... }\mathbf{(\beta)} $$
Trabajando en la ecuación $\alpha$, Asumiendo linealidad de la válvula entonces reemplazando $q_o=h/R$
$$ q_i-\frac{h}{R}=\frac{dV}{dt}\space\space\space\space\textbf{... }\mathbf{(\gamma)} $$
Reescribiendo la ecuación en estado estacionario
$$ q_{is}-\frac{h_s}{R}=0\space\space\space\space\textbf{... }\mathbf{(\theta)} $$
Restando $\theta$ de $\gamma$ y sabiendo que $dV=d(V-V_s)$ por ser $V_s$ constante.
$$ q_i-q_{is}-\frac{h-h_s}{R}=\frac{d(V-V_s)}{dt} $$
Reemplazando la ecuación $\beta$
$$ q_i-q_{is}-\frac{h-h_s}{R}=3k_1h_s^2\frac{d(h-h_s)}{dt} $$
Cambiando a variables desviación
$$ Q_i-\frac{H}{R}=3k_1h_s^2\frac{d(H)}{dt} $$
Aplicando la transformada de Laplace ($H(t=0) = h_s-h_s = 0$)
$$ Q_i(s)-\frac{H(s)}{R}=3k_1h_s^2(sH(s)-H(t=0)) $$
$$ Q_i(s)-\frac{H(s)}{R}=3k_1h_s^2sH(s) $$
$$ \frac{H(s)}{Q_i(s)}=\frac{R}{3k_1h_s^2R\cdot s+1} $$
Reemplazando adecuadamente y sabiendo que $k_1=\pi \cdot tan^2(15°)/3$
$$ \frac{H(s)}{Q_i(s)}=\frac{K_p}{\tau s+1} $$
Con $\tau =\pi \cdot tan^2(15°)\cdot h_s^2\cdot R\space\space;$ $\space\space K_p = R$
Referencias
- Coughanowr, D. R.; LeBlanc, S. E. (2009). Process Systems Analysis and Control (3rd edition). McGraw-Hill. ISBN 978-0-07-339789-4.